I would like to set up a timer in order to call a function 800 times per second. I'm using the Arduino Mega and Timer3 with a prescaler of 1024. To choose the prescaler factor I've considered the following steps:
- CPU freq: 16MHz
- Timer resolution: 65536 (16 bits)
- Divide CPU freq by the chosen prescaler: 16x10^6/1024=15625
- Divide the rest through the desired freq 62500/800=19.
- Put the result + 1 in OCR3 register.
I've used the following table to set registers of TCCR3B:
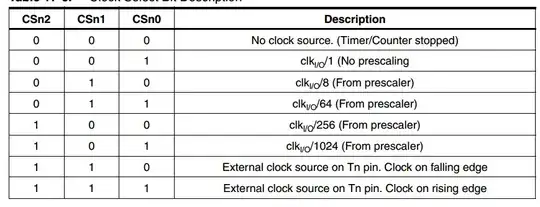
The error
It is impossible to compile the code. This is the error returned by the compiler:
Servo\Servo.cpp.o: In function '__vector_32': C:\Program Files (x86)\Arduino\libraries\Servo/Servo.cpp:110: multiple definition of '__vector_32' AccelPart1_35.cpp.o:C:\Program Files (x86)\Arduino/AccelPart1_35.ino:457: first defined here c:/program files (x86)/arduino/hardware/tools/avr/bin/../lib/gcc/avr/4.3.2/../../../../avr/bin/ld.exe: Disabling relaxation: it will not work with multiple definitions
The code
volatile int cont = 0;
unsigned long aCont = 0;
void setup()
{
[...]
// initialize Timer3
cli(); // disable global interrupts
TCCR3A = 0; // set entire TCCR3A register to 0
TCCR3B = 0; // same for TCCR3B
// set compare match register to desired timer count: 800 Hz
OCR3A = 20;
// turn on CTC mode:
TCCR3B |= (1 << WGM12);
// Set CS10 and CS12 bits for 1024 prescaler:
TCCR3B |= (1 << CS30) | (1 << CS32);
// enable timer compare interrupt:
TIMSK3 |= (1 << OCIE3A);
// enable global interrupts:
sei();
}
void loop()
{
// Print every second the number of ISR invoked -> should be 100
if ( millis() % 1000 == 0)
{
Serial.println();
Serial.print(" tick: ");
Serial.println(contatore);
contatore = 0;
}
}
[...]
// This is the 457-th line
ISR(TIMER3_COMPA_vect)
{
accRoutine();
contatore++;
}
void accRoutine()
{
// reads analog values
}
How to solve the conflict with the servo library?
SOLUTION
Conflict solved using the following code. It compiles but the counter associated with the 800Hz timer doesn't increment its value.
volatile int cont = 0;
void setup()
{
Serial.begin(9600);
// Initialize Timer
cli(); // disable global interrupts
TCCR3A = 0; // set entire TCCR3A register to 0
TCCR3B = 0; // same for TCCR3B
// set compare match register to desired timer count: 800 Hz
OCR3B = 20;
// turn on CTC mode:
TCCR3B |= (1 << WGM12);
// Set CS10 and CS12 bits for 1024 prescaler:
TCCR3B |= (1 << CS30) | (1 << CS32);
// enable timer compare interrupt:
TIMSK3 |= (1 << OCIE3B);
// enable global interrupts:
sei();
Serial.println("Setup completed");
}
void loop()
{
if (millis() % 1000 == 0)
{
Serial.print(" tick: ");
Serial.println(cont);
cont = 0;
}
}
ISR(TIMER3_COMPB_vect)
{
cont++;
}
Since the main problem has been solved, I've created another question here related to the problem of the counter incrementation.